League Wrapped
Software Design: A spinoff of Spotify Wrapped, compiles lowlights of a player's season 12 performance.

March 2022 - April 2022
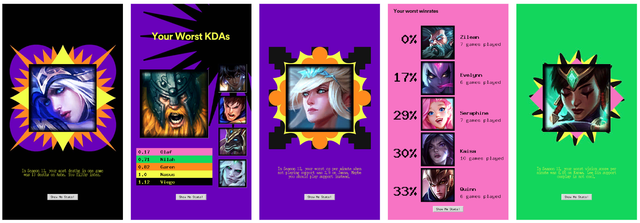
Alongside my partner Ian Lum, we made a visualizer of a League of Legends player's lowlights. Using the Riot Games API, our app calculates a player's worst champion KDAs, champion winrates, games with the most deaths, games with the least cs/m, and games with the least vision/m.
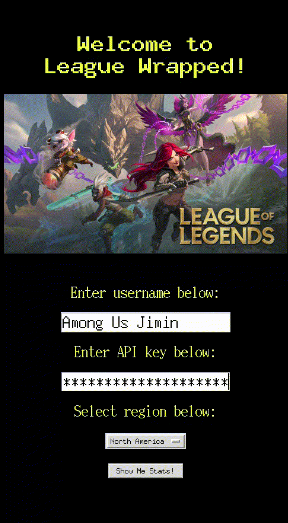
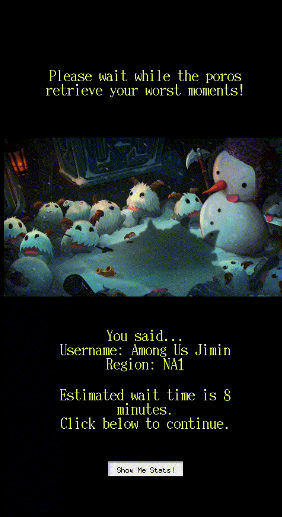
However, to get their statistics, they need to first input their username, Riot Games API key, and region. Afterwards, they are taken to a loading screen with an estimated wait time. The estimation is calculated through the number of games they played during season 12 because the Riot Games API requests are limited to 100 requests every 2 minutes.
Using Tkinter, the user is given visualizations of their statistics.